Drone contest technical documentation⚓
Holybro S500⚓
Notice d'assemblage du chassis du S500
Connecteurs⚓
Raspberry <-> pixhawk
https://discuss.ardupilot.org/t/pixhawk-6c-to-rpi-4-connection/104768/7
Batteries⚓
Terminologie⚓
1C : Courant en Ampère correspondant à la capacité de la batterie en Ah. C’est souvent la valeur pour le courant de charge.
Desire Power PRO Series 4000mAh 4S 14.8V 35C LiPo Battery⚓
Used as power supply embedded on the drone
| Caracteristics | Value |
|---|---|
| Technologie | LiPo |
| Capacité | 4000 mAh |
| Tension | 4s 14,8V |
| Décharge continue maximale | 35C |
| Décharge maximale en rafale | 70 C |
| Poids | 386 g |
| Dimensions | 135 x 42 x 31,2 mm |
| Connecteur d'équilibrage | JST-XH |
| Connecteur de décharge | XT60 |
| Taux de charge | 1-3C recommandé, 5C max. |
| Tension de charge cible par cellule | 4,2V |
| Courant de charge | 4A |
| Tension minimale de décharge | 3,2V/cell |
| Tension maximale de charge | 4,2V/cell |
Branchement pour la charge :

Gens ace 3000mAh 7.4V 2S Transmitter Pack⚓
Used as power supply embedded on the radio command
Warning
| Caracteristics | Value |
|---|---|
| SKU | GEA30002STXJ |
| Net Weight (g) | 128 |
| Brand | Gens Ace |
| Capacity | 3000 mAh |
| Discharge Rate (C) | 1 |
| Max Burst discharge Rate (C) | 2 |
| Parallel (P) | 1 |
| Voltage | 2S (7.4V) |
| Length (mm) | 98 |
| Width (mm) | 28.5 |
| Thickness(mm) | 17.5 |
| Wire Gauge | 18# |
| Wire Length (C/D) | 60mm/125mm |
| Connector Type | JST |
| Balancer Connector Type | JST-XHR |
| Stockage à 3,8V/cellule | |
| Tension de charge cible par cellule | 4,2V |
| Courant de charge | 3A |
| Tension minimale de décharge | 3,2V/cell |
| Tension maximale de charge | 4,2V/cell |
Branchement pour la charge :

Chargeur de Batteries⚓
Connection entre RPi et PixHawk⚓
Le guide n'étant pas toujours très clair, voici des informations supplémentaires.
 Figure 1 : Câblage entre PixHack 6c et RPi 5
Figure 1 : Câblage entre PixHack 6c et RPi 5
Concernant l’ordre des câbles insérés au GH1-6 pins ainsi que la connexion des pins DuPont, il faut se référer à la doc disponible au lien 1 [^1]. Cette image permet simplement de donner le sens du GH1 (la partie plastique blanche qui s’insère dans le port TELEM2 du Pixhawk) pour ensuite câbler correctement.
L’alimentation du PixHawk doit être de 5V. Nous l’avons donc branché à un port USB du PC ce qui permet en plus de pouvoir avoir accès aux paramètres du PixHawck via QGroundControl.
ESC et moteurs⚓
Connections moteurs⚓
Pour cette partie : Ajouter une image de la connection des connections entre moteur et Pixhawk
Calibration moteurs⚓
Pour effectuer la calibration des moteurs, suivez ce lien : PX4 actuators calibration
Radio commande FrSky Taranis X9D plus⚓
Setup Matériel⚓
Branchement de la batterie :

Connections et setup de la télémétrie⚓
Pour cette partie : Suivez cette vidéo qui permet d'établir le lien entre la télécommande et le module FrSky
Calibration télémétrie⚓
Pour effectuer la calibration de la télémétrie, suivez ce lien : PX4 RC radio setup
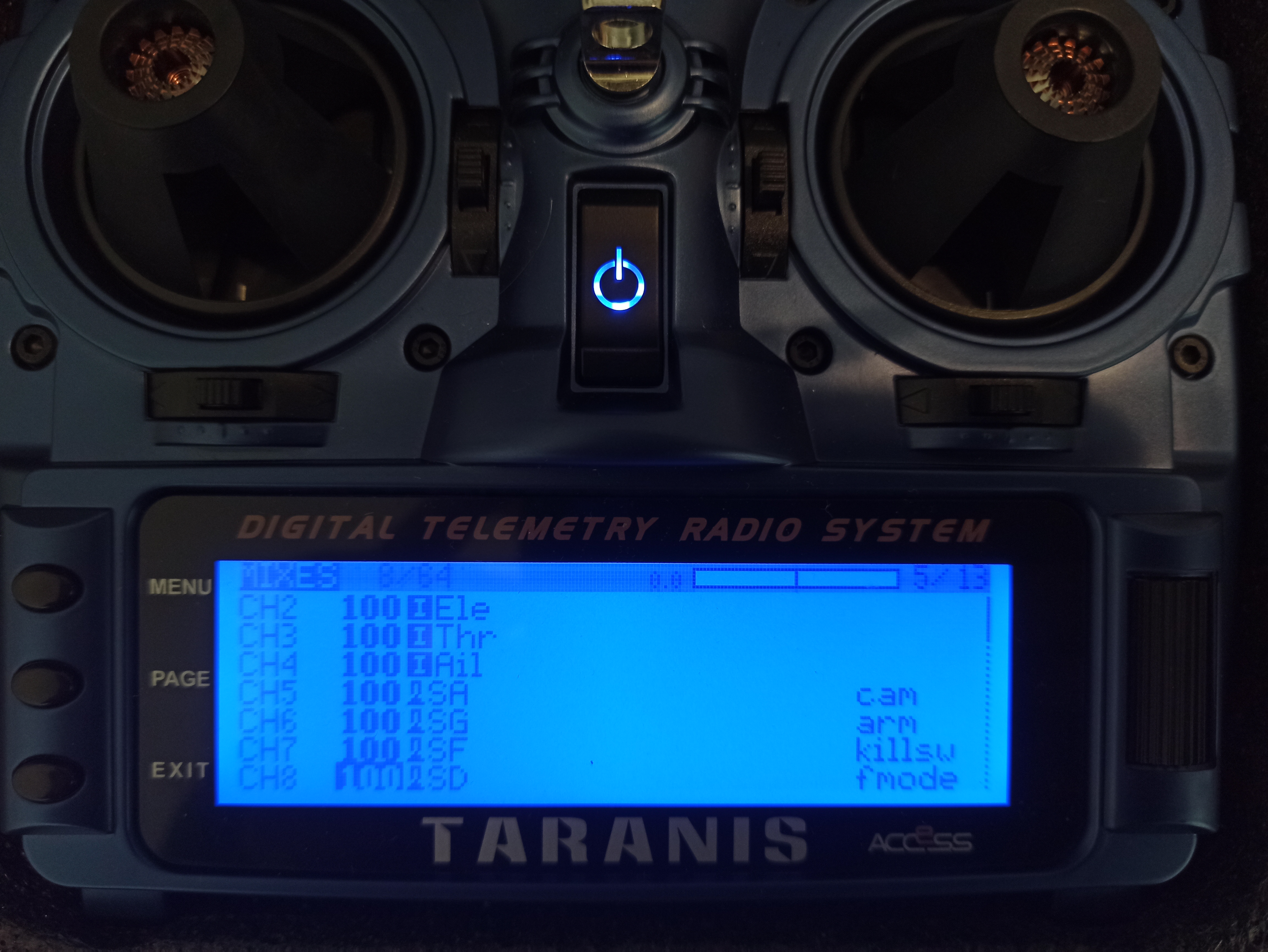
Lier les switch de la télécommande avec le PixHawk⚓
Voici une vidéo qui montre comment configurer la télécommande
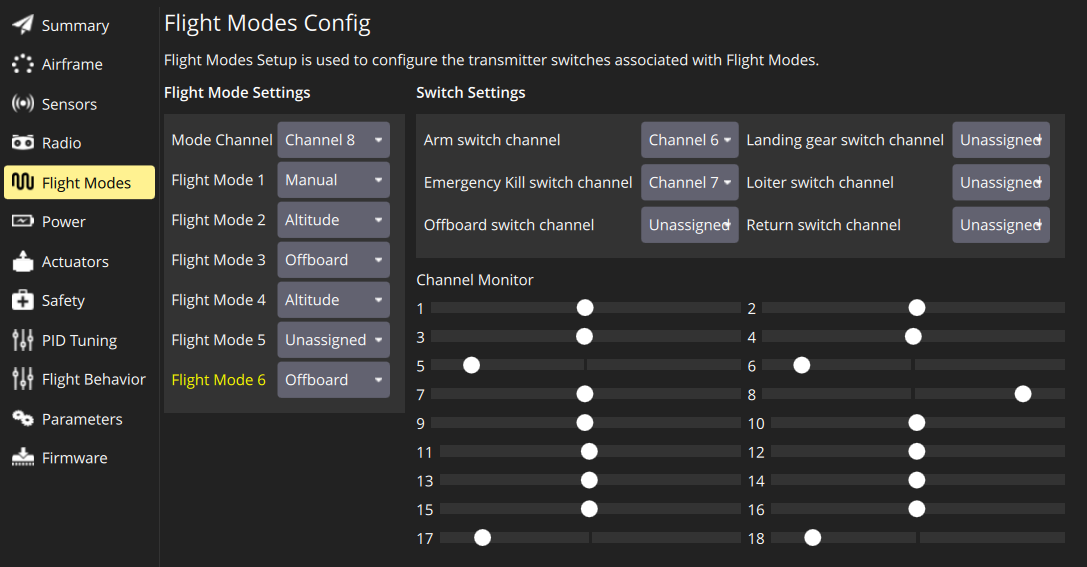
Voici une vidéo qui montre comment configurer QGroundcontrol Pour celle-ci, vous pouvez aller directement à la section Select Flight modes.
[!IMPORTANT] Il est aussi vivement conseillé de définir des switchs pour le KillSwitch et l'Arm sur la télécommande.
Configuration de la télécommande et de QGroundcontrol actuelle⚓
Télécommande :
QGroundcontrol :
GPS et PixHawk⚓
Connection entre GPS et PixHawk⚓
Pour cette partie : Connexion du GPS
[!Note] Notre GPS est un M10N mais cela ne présentera pas de différence pour la connection et la calibration du GPS.
Calibration GPS et PixHawk⚓
Pour cette partie, suivez ce lien : Calibration du GPS
Connection entre Caméra événementielle et RPi⚓
La connection se fait via une nappe csi. La seule précaution à prendre lors de la connection est de ne pas abimer les connecteurs et de bien brancher les partie métalliques aux bouts de la nappe face aux broches des connecteurs de la Raspberry.
Glossaire⚓
| acronyme | Description |
|---|---|
| FMU | Flight Management Unit |
| IMU | Inertial measurement unit |
| VTX | Video Transmitter |