Setup du simulateur⚓
Le simulateur que nous allons installer dans ce guide tourne sur gazebo (pour un x500 quadrotor).
Voici la configuration que nous allons considérer ici pour l’installation de cette simulation :
- Ubuntu 24.04.3 LTS
- ROS 2 Jazzy
WSL2 pour windows⚓
Afin de faire tourner cette simulation sur windows, nous allons installer WSL2. Si vous êtes sur Linux, vous pouvez passer cette étape.
Lancer dans un terminal lancé en mode administrateur
1 | |
Puis installez la distribution Ubuntu 24.04 LTS
1 | |
Éventuellement, lancez là par défaut lorsque vous ouvrez WSL :
1 | |
Installation du simulateur⚓
Ensuite, nous allons suivre le guide disponible en 1 Ce qui est important de retenir ici est que nous allons remplacer: le drone physique (ensemble des capteurs + moteurs + contrôleur de vol) par un drone simulé (gazebo) que l’on peut configurer avec QGroundcontrol l’ordinateur de bord (la RPi) par votre ordinateur qui tourne sur Linux (WSL) la communication entre les deux acteurs précédents utilise toujours Micro XRCE-DDS Agent & Client mais en interne QGroundcontrol demeure identique à notre utilisation précédente, nous n’aurons simplement pas à calibrer les capteurs, …
Installation de PX4 (pour utiliser le simulateur PX4)⚓
Suivre la procédure donnée dans le guide dans la section concernée. Commande pour lancer le simulateur :
1 | |
Installation de ROS 2 jazzy⚓
[!WARNING] NE PAS SUIVRE CETTE SECTION → Suivre plutôt le guide d’installation de la doc de ROS2 jazzy en 3
Installez - à la fin du guide - la version “recommanded” et non la version “bare bones” avec la commande suivante
1 | |
[!IMPORTANT] L’installation de pyros-genmsg setuptools peut nécessiter l’installation d’un environnement virtuel pour python. Ainsi à chaque fois que vous souhaitez utiliser le simulateur, n’oubliez pas de sourcer
- ROS2 : source /opt/ros/jazzy/setup.bash
- environnement python : source ~/path-to-your-env/bin/activate
Setup Micro XRCE-DDS Agent & Client⚓
Suivre la procédure donnée dans le guide dans la section concernée.
Commande pour lancer la communication entre la simulation gazebo et l’ordinateur :
1 | |
Installation de QGroundcontrol⚓
Suivre le guilde en 2
Build & Run ROS 2 Workspace⚓
Installer colcon
1 | |
Remplacez chaque commande ROS2 du guide (qui utilise ROS2 "humble") par “jazzy” Suivre la procédure donnée dans le guide dans la section concernée
Le build de l’espace de travail ROS2 peut prendre un peu de temps.
Enfin, si ce n’est déjà fait, lancez dans l’ordre :
-
Fenêtre Terminal 1 Start the agent with settings for connecting to the uXRCE-DDS client running on the simulator:
1MicroXRCEAgent udp4 -p 8888 -
Fenêtre Terminal 2 Start a PX4 Gazebo simulation using:
1 2
cd ~/PX4-Autopilot make px4_sitl gz_x500 -
Fenêtre Terminal 3
1./QGroundControl-x86_64.AppImage -
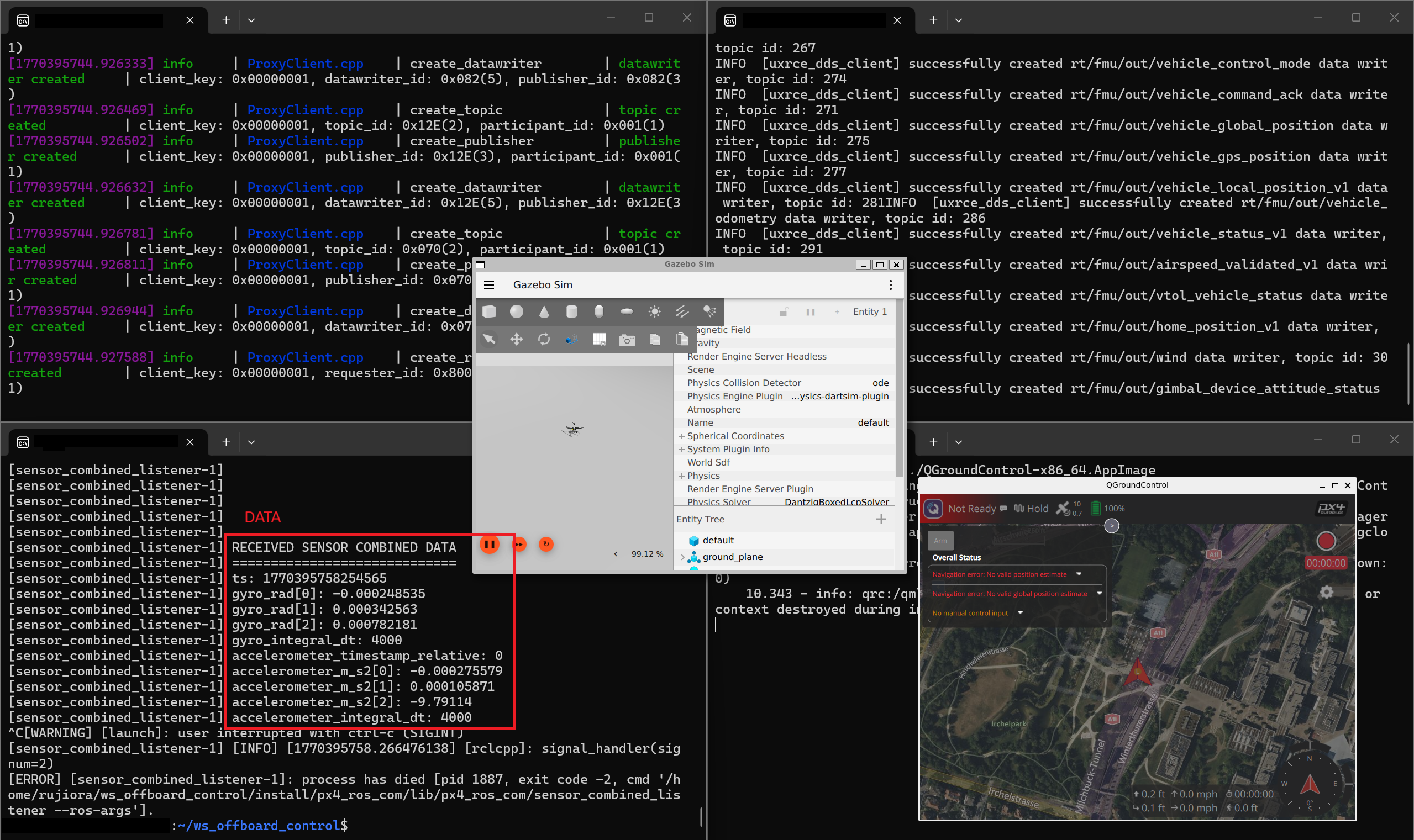
Fenêtre Terminal 4 :
1 2 3 4
source /opt/ros/jazzy/setup.bash cd ~/ws_sensor_combined/ source install/local_setup.bash ros2 launch px4_ros_com sensor_combined_listener.launch.py
Vous devriez observer les données suivantes défilées dans le dernier terminal.